Single Port Robot Assisted Kidney Transplantation
Glickman Urological and Kidney Institute CCF, Cleveland, OH
Meeting: 2020 American Transplant Congress
Abstract number: C-112
Keywords: High-risk, Kidney transplantation, Obesity, Quality of life
Session Information
Session Name: Poster Session C: Kidney Technical
Session Type: Poster Session
Date: Saturday, May 30, 2020
Session Time: 3:15pm-4:00pm
 Presentation Time: 3:30pm-4:00pm
Presentation Time: 3:30pm-4:00pm
Location: Virtual
*Purpose: Innovative methods are needed to further optimize safe outcomes in kidney transplantation (KT), therefore as an alternative surgical approach we present a single case using the single port (SP) robotic platform in KT.
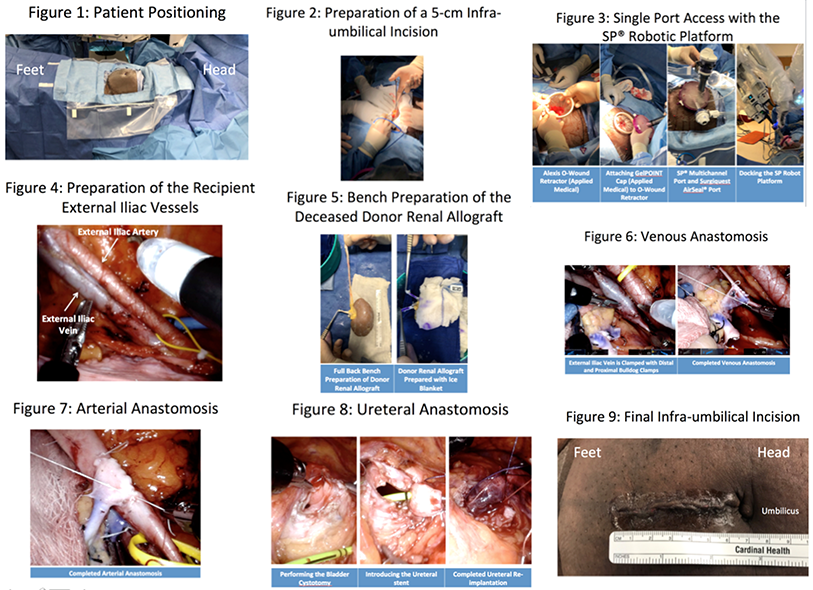
*Methods: The patient is placed supine Trendelenberg position with left rotation (Fig 1). A 5 cm infra-umbilical abdominal incision is made (Fig 2). The Alexis O Wound Retractor is placed and attached to the GelPOINT Advanced Access Platform. The multichannel SP cannula and Surgiquest AirSeal port are placed through the GelPOINT cap. After insufflation the robot is docked (Fig 3). The right external iliac vessels (EIVs) are prepared (Fig 4). The retropubic space is developed to isolate the bladder dome. The deceased donor allograft is wrapped in an ice blanket during standard back table preparation (Fig 5). The donor kidney is introduced, insufflation is reinitiated and the robot is redocked. The kidney is positioned medially with the hilum placed in proximity to the EIVs. Laparoscopic bulldog clamps are placed on the external iliac vein and a venotomy is made. The donor renal vein anastomosis is completed in running end-to-side fashion with GoreTex CV5 suture (Fig 6). The donor renal artery is sewn in similar fashion (Fig 7). The clamps are removed, hemostasis is achieved, and the kidney is rotated to rest on the psoas muscle. The urinary bladder and ureter are prepared and sewn with 4-0 vicryl suture in continuous direct onlay fashion. A concurrent 4.6F x 14 cm ureteral stent is placed (Fig 8). A 3 point nephropexy is performed. The fascia and skin are closed (Fig 9).
*Results: The patient was a 30-year old female with hypertension and end-stage renal disease. She had been on peritoneal dialysis for 40 months with a normal urine output. Her BMI was 38 kg/m2. She was highly sensitized and received 6 mg/kg of anti thymocyte globulin for induction immunotherapy. Operative time was 301 min, revascularization time was 57 min (vein 30 min, artery 27 min) and cold ischemic time was 404 min. Estimated blood loss was 50 mL. Hospital length of stay was 2 days. Serum creatinine was 14.3, 10.6, 4.6, 2.5, and 1.8 mg/dL on 0, 2, 7, 14 and 42 days after surgery. There were no complications.
*Conclusions: To our knowledge this is the first case showing the feasibility of use of the SP robot in KT. Use of the da Vinci SP robotic platform may help transplant surgeons reach additional high risk recipient pools. Benefits may include reduced overall number of incisions required in multiport robotic surgery, reduced length of stay, and smaller incisions in patients with high BMI.
To cite this abstract in AMA style:
Miller E, Wilson C, Sawczyg G, Kim S, Aminsharifi A, Garisto J, Kaouk J, Wee A, Eltemamy M. Single Port Robot Assisted Kidney Transplantation [abstract]. Am J Transplant. 2020; 20 (suppl 3). https://atcmeetingabstracts.com/abstract/single-port-robot-assisted-kidney-transplantation/. Accessed May 31, 2026.« Back to 2020 American Transplant Congress